
2025年度現在の研究内容
クラウドとIoTを活用したロボットシステム
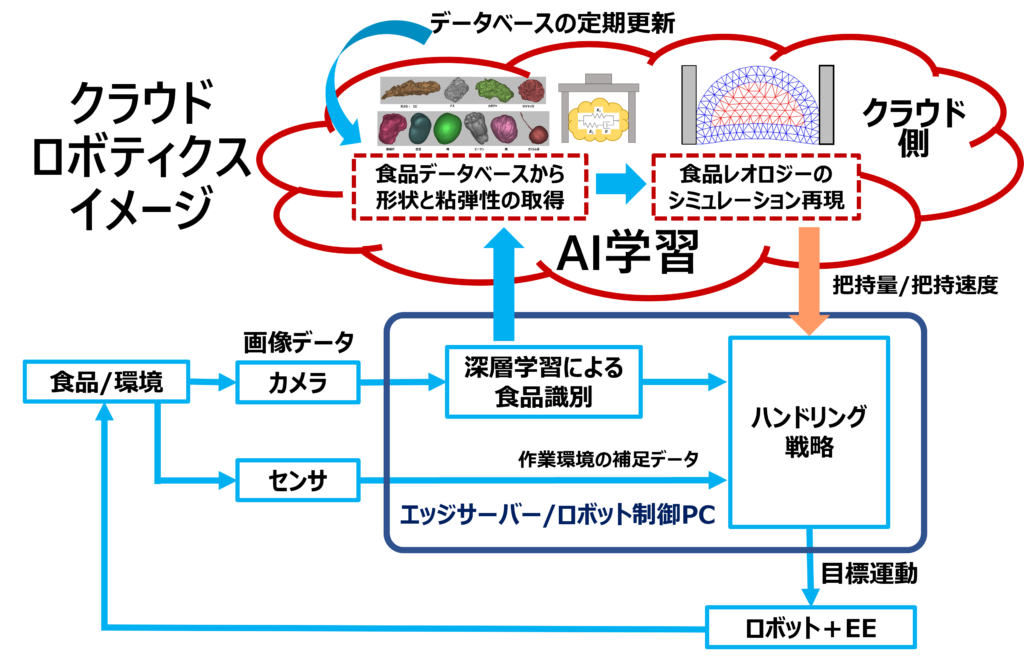
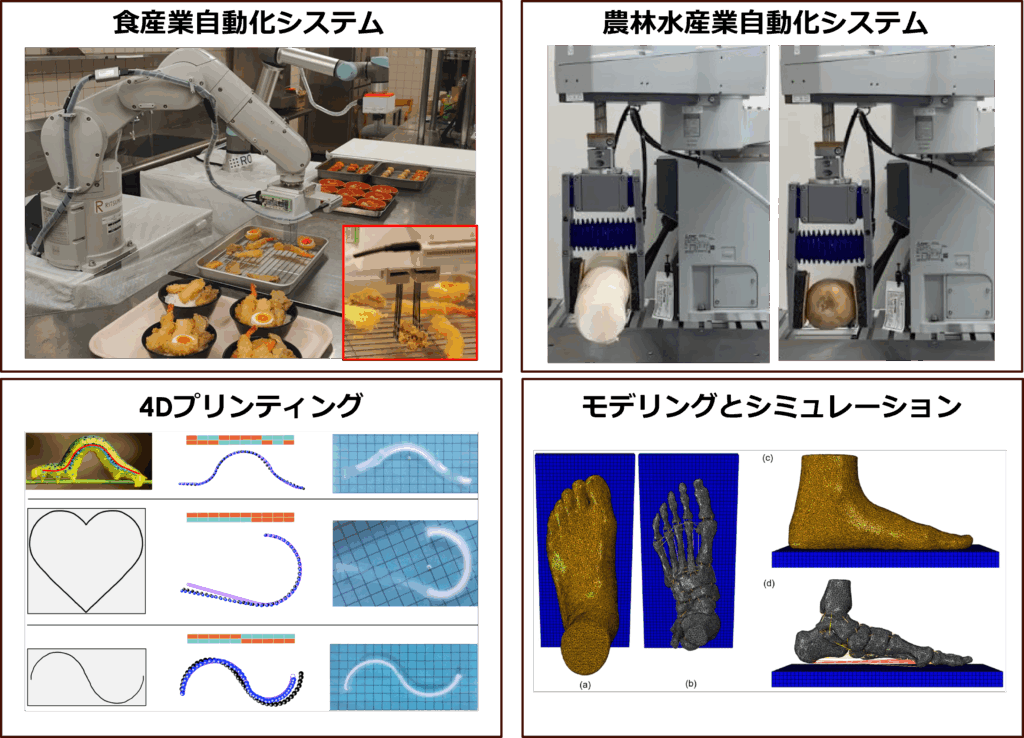
Society 5.0(サイバー空間とフィジカル空間を高度に融合させたシステムにより、経済発展と社会的課題の解決を両立する、人間中心的社会)を支える柱であるクラウド、IoT、ビッグデータ、AIなどの技術を活用してロボットシステムの最適化と柔軟性を実現するための研究を幅広く推進し、様々な分野での実用化を目指している。現在バラ積みピッキングの環境下の食品認識、食品データベース、IoTセンサーモジュールを用いたロボットシステムの遠隔監視、ROS/ROS2に基づくロボットシステムの構築などの研究を進めている。【文献1】【文献2】
ハンドリングのための食品データベース
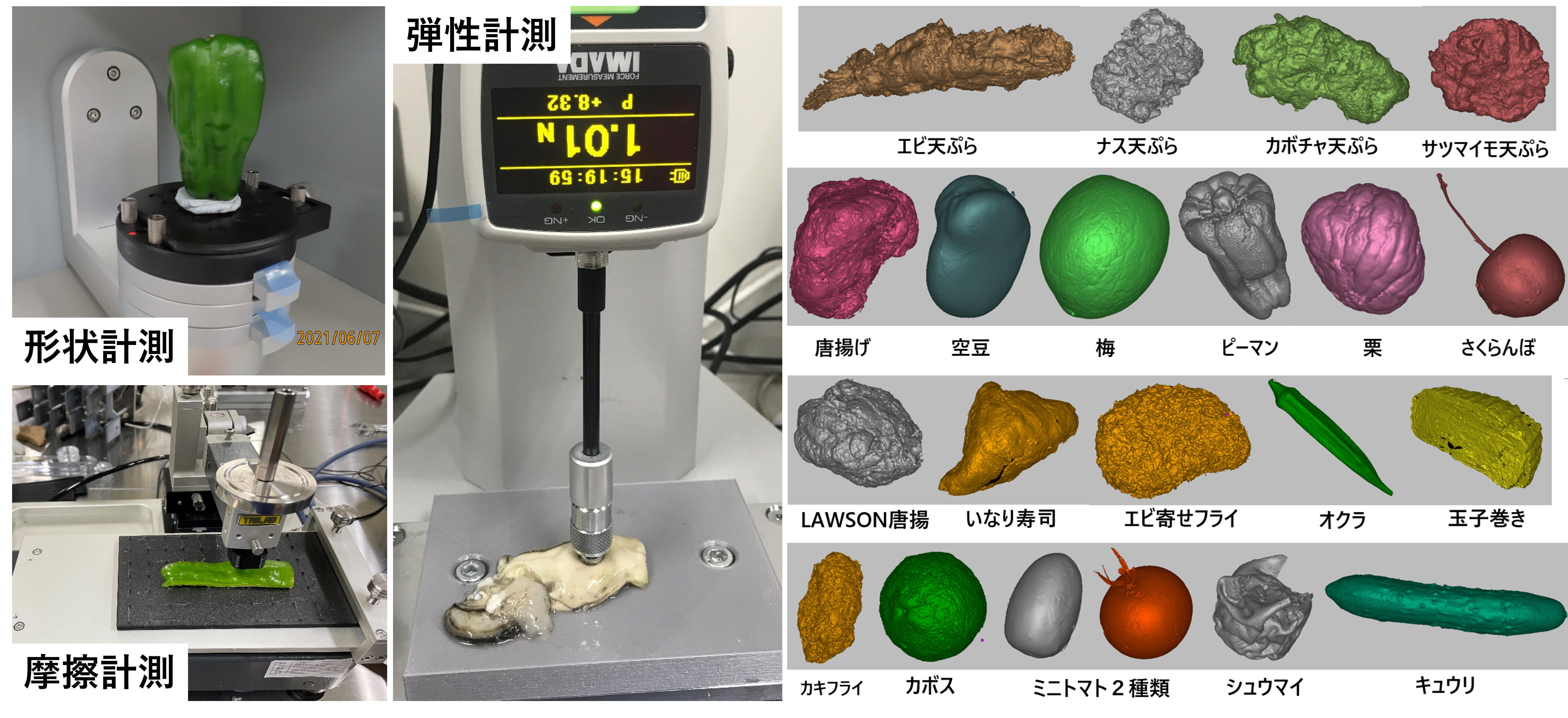
食品をロボットでハンドリングする際に、形状、柔らかさ、摩擦などの情報が重要である。そのため、本研究室では食品ハンドリングのためのデータベースを構築している。食品の3D形状はデスクトップ型3Dスキャナーで計測する。食品の柔らかさを定量的に表現するため、ヤング率を用いる。球型接触子を用いて圧縮試験を行い、ヘルツの接触理論でヤング率を推定する。また、食品の摩擦係数の計測するために、摩擦試験機を利用する。食品の一部と切り出して固定し、ステンレス板との摩擦係数を計測する。
キュウリ自動箱詰めロボット
キュウリなどの農作物を自動箱詰めに関する研究である。キュウリを傷つけずにハンドリングするために、硬質シェルと柔軟膜を有する平行シェルグリッパを提案した。薄くかつ低コストで製作するために、Demolding-freeという新しい型成形方法を提案した。シェルの内部構造を工夫することによって、厚さ3mmのグリッパの製作を実現した。実用化に向けて9本のキュウリを同時に自動箱詰めするロボットエンドエフェクタを製作し、実証実験を行った。左の動画は実証実験の様子を示す。【文献1】【文献2】【文献3】【文献4】
天ぷら自動盛り付けロボット
天ぷらの自動盛り付け作業に関する研究である。ベルトコンベアから流れてきた天ぷらを画像処理で認識し、把持位置と姿勢を取得する。受動間接を有する3本の棒で構成されるロボットハンドを用いて天ぷらを把持する。モータの電流を制御することで把持力を調整する。把持した天ぷらを盛り付け皿の上部移動させ、そこで盛り付け皿の位置と姿勢を3Dカメラで計測する。盛り付け皿の中心を基準にして、各天ぷらの盛り付け位置と姿勢を計算し、ロボットマニピュレータを制御して、盛り付け作業を行う。5種類天ぷら(カボチャ、レンコン、ナス、エビ、シシトウ)の自動盛り付けは約1分で完成できる。【文献1】【文献2】【文献3】